Nadie podía imaginar hasta relativamente poco que se podrían construir viviendas in-situ con la ayuda de un brazo robótico por impresión 3D en apenas 24 horas o como mucho en unos pocos días días, algo iimpensable hasta hace muy poco se esta materializando ante nuestros ojos. Siendo tan solo el inicio de lo que puede ser un futuro no muy lejano la tecnología que nos permita definitivamente colonizar otros planetas.
LA ARQUITECTURA 3D Y SUS ANTECEDENTES COLABORATIVOS
Pero antes de que todo esto se concretara, ha habido un largo proceso de estudio y observación, en el que el verdadero protagonista ha sido nuestro entorno natural. Mas concretamente los que en principio formarian parte del reino animal menos visible para nosotros mortales humanos.
Y que están compuestos por centenares de miles de millones de individuos, que con su abnegada labor construyen las decenas de kilómetros de galerías que forman todos y cada uno de los hormigueros que habitan, o los miles de celdas hexagonales que forman una colmena donde las abejas depositan su néctar. Y cuya disciplinada y coordinada forma de trabajar colectiva ha servido de inspiración para desarrollar en la practica las técnicas que en breve formaran parte de nuestros usos cotidianos constructivos, contribuyendo a la mayor revolución arquitectónica de la historia.
LAS TERMITAS Y SUS EXTRAORDINARIAS HABILIDADES CONSTRUCTIVAS
Mas concretamente un insecto (aunque puede sorprender a mas de uno) que por su tenacidad devoradora y connotaciones catastróficas, sin embargo se ha convertido en uno de los principales ejemplos a inmitar a la hora de tratar de desarrollar los patrones de movimento que ejecutan de forma concisa una impresora 3D. Y es que las termitas ese denostado insecto que pertenece al infraorden de los neópteros.
Se ha convertido por su peculiar morfología y portentosas características de fuerza y agilidad en relación a su estatura y masa, en el espécimen ideal a partir del que mimetizar sus excelentes cualidades constructivas. Trasladandolas a la practica constructiva donde ha exhibido todo su potencial augurando un gran futuro.
Investigaciones como la dirigida por los Justin Werfel, Radhika Nagpal y Kirstin Petersen pertenecientes al departamento de biología de la Universidad de Harvard. Y cuyos prometedores resultados fueron publicados en 2014 en el numero de Febrero de Science, describiendo las diferentes partes de la anatomía que habían sido seleccionadas de una muestra de una población de termitas.
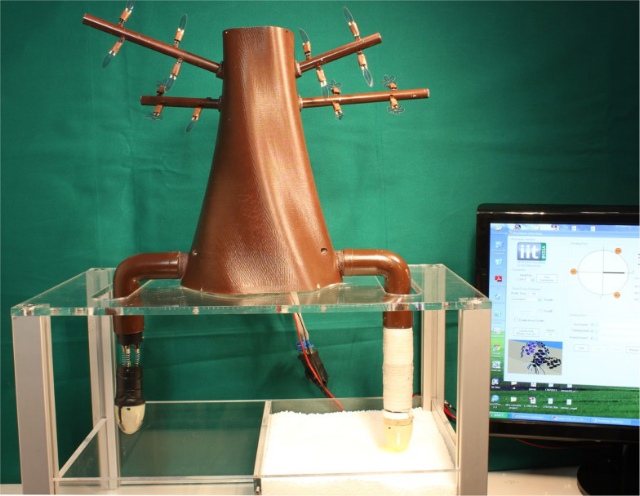
Recogida en un bosque próximo y que tras computerizar sus movimientos así como los parametros de fuerza, agilidad y movimientos observados en diferentes tipos de terreno. Sirvieron para desarrollar algoritmos cuya función consistía en ensamblar las partes articuladas de pequeños robots que mostraban las misma destreza y maniobralidad que una diminuta termita, ejecutando las mismas tareas constructivas que su molde original.
Diferentes ordenes que forman parte del reino animal, se han convertido en las ultimas décadas en los mas precisos modelos a partir de los que desarrollar las mas avanzadas y eficaces herramientas en el sector de la construcción de un futuro cada vez mas presente.
Los robots formados por un cuerpo central, del que salían cuatro brazos finalizados en ruedas dentadas, se convertian en el apoyo idóneo que permitían a estas termitas robotizadas fijar sus patas a las diferentes irregularidades del terreno, pudiendo sortear de forma solvente diferentes obstáculos dispuestos sobre el terreno.
Así como la realización de maniobras de apilamiento de cargas pesadas y el ensamblaje de volumenes poligonales, actuaciones ejecutadas con una destreza igual o superior a la mostrada por cualquier albañil con experiencia. Prometedores resultados que ya han llamado la atención de alguna de las mayores constructuras del mundo, y cuya puesta en practica les permitiría ahorrar decenas de miles de millones en recursos humanos y en pleitos en los juzgados relacionados con desperfectos que se manifiestan tras ejecutarse la obra.
RELACIONADO: MIT Media Lab - Silk Pavillion
























.webp)


.webp)





_edit_188822180547080.png)
_edit_8099193296908.jpg)










.jpg)