Hasta ahora los sistemas de impresión en 3D que están apareciendo, no dejan de ser fuegos de artificio que parecen extraídos de una película de ciencia ficción con escasas posibilidades de poder aplicarse en términos productivos. Sin embargo estamos asistiendo probablemente a una revolución que modificara nuestros patrones de consumo.
Uno de los sectores donde mas interés esta suscitando la tecnología de impresión 3D, es en el sector de la construcción, la posibilidad de trasladar diseños arquitectónicos del plano original al plano físico utilizando robots que empleando innovadores materiales es tentador. Métodos mas eficaces mas limpios y rápidos de edificación ofrecen un amplio abanico de posibilidades por explotar.
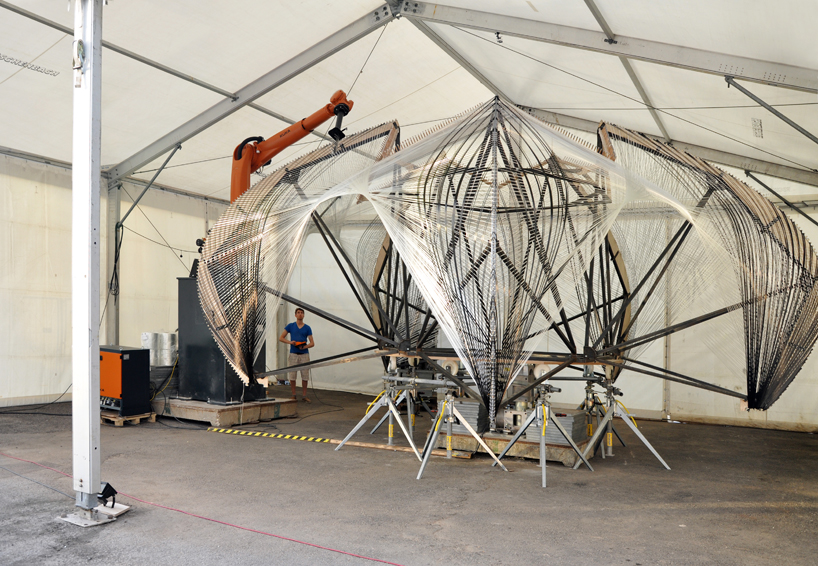
Liderados por Petr Novikov y Saša Jokić, un equipo de investigadores del Instituto de Arquitectura Avanzada de Cataluña (IAAC) en colaboración con el Joris Laarman Studio en Amsterdam han desarrollado una nueva tecnología de fabricación aditiva denominada como MATAERIAL. Mediante el uso de la tecnología de extrusión es capaz de neutralizar el efecto de la gravedad durante el curso del proceso de impresión.
La máquina es esencialmente un brazo articulado que puede crear objetos tridimensionales en cualquier superficie, independientemente de su grado de inclinación y superficie ya sea lisa o irregular. Este método facilita la flexibilidad para crear objetos verdaderamente naturales, haciendo curvas en 3D en lugar de capas de 2D. A diferencia de las capas 2D que depositan capas tan solo en superficies solidas de forma horizontal, las curvas de 3D pueden seguir líneas de tensión exactas de una forma personalizada.
El material de aspecto viscoso es expulsado a través de la boquilla situada en uno de los extremos de la manguera. Los polímeros se acumulan recordando los trazados que se realizan con las mangas pasteleras. En este caso el material no se encuentra ni en estado liquido ni solido, siendo la parte mas difícil de todo este delicado proceso de sedimentación. Porque si se solidifica antes de que salga de la boquilla se interrumpirá la trayectoria, pero si se solidifica después de salir de la boquilla se precipitara a la superficie.
Para solventar este problema, se han usado dos polímeros líquidos termoestables cuyos nombres se mantienen en secreto, en lugar de los plásticos que se utilizan en la actualidad, facilitando que la mezcla, se endurezca de forma rápida. Una reacción química entre los dos componentes del polímero termoendurecible hace que el material se solidifique a medida que sale de la boquilla.
Bautizado como el método de "modelado de objetos anti-gravedad", proporciona el tiempo justo para que el material se solidifique pudiendo proyectar cualquier tipo la estructura en el vació independientemente de la orientación en que se apoye.
Bautizado como el método de "modelado de objetos anti-gravedad", proporciona el tiempo justo para que el material se solidifique pudiendo proyectar cualquier tipo la estructura en el vació independientemente de la orientación en que se apoye.
Material tecnología de la que se esta tramitando su patente también permite un tratamiento preciso del uso del color con el que se desea imprimir. Jeringas con cían, magenta, amarillo y negro permiten colorear, cambiando las proporciones y la personalización del color.
Los métodos convencionales de fabricación aditiva se han visto afectados tanto por la gravedad y el entorno de impresión: la creación de objetos 3D en superficies irregulares no horizontales hasta el momento ha sido considerados una quimera. Pero mediante el uso de la tecnología de extrusión que representa Material es posible neutralizar el efecto de la gravedad durante el proceso de impresión.
.
.












_edit_188822180547080.png)
_edit_8099193296908.jpg)